IoT - Internet Of Things
Wireless
Board phát triển


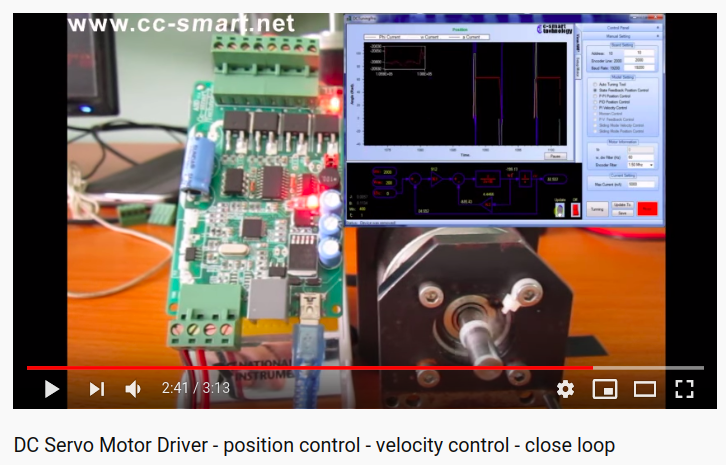
Mạch điều khiển động cơ DC Servo MSD_AH
Tổng quan

- MSD_AH là module điều khiển động cơ DC Servo, được thiết kế chuyên biệt hỗ trợ tương thích với Arduino. Mỗi một driver MSD_AH sẽ được đánh một địa chỉ cố định nhờ đó người sử dụng có thể dễ dàng điều khiển cùng lúc nhiều động cơ khác nhau với một board chủ Arduino thông qua mạng UART.
- Với sự hỗ trợ hết sức mạnh mẽ của nhân ARM Coretex-M3, công nghệ Mosfet tiên tiến, đặc biệt sự kết hợp các thuật toán kinh điển về điều khiển vòng kín. Chúng tôi cho ra đời sản phẩm điều khiển động cơ DC Servo với độ chính xác cao. Sản phẩm tích hợp nhiều thuật toán điều khiển vòng kín và khối công suất trên cùng một board mạch. Giúp board mạch hết sức nhỏ gọn và giảm chi phí đáng kể cho người sử dụng.
- Với một driver bạn có thể sử dụng để điều khiển vận tốc hoặc vị trí và vận tốc.
- Đặc biệt driver được kèm theo một phần mềm, tích hợp công cụ tự động dò tìm thông số của hệ thống từ đó đưa ra các chuẩn đoán về các hệ số điều khiển của động cơ. Phần mềm còn hỗ trợ người dùng quan sát, kiểm thử đắp ứng của hệ thống một cách trực quan và trực tiếp.
Ứng dụng
- Tìm hiểu sâu hơn về phương pháp điều khiển vòng kín.
- Ứng dụng trong giảng dạy, nghiên cứu.
- Robot, CNC.
- Nghiên cứu và chế tạo ra các máy móc tự động với độ chính xác cao.
Thông tin kĩ thuật
- Tương thích với Arduino Uno, Arduino Mega.
- Phương pháp điều khiển Master (Arduino) to many slave (MSD_AH)
- 10-30VDC, 0-20A, 0-400W
- Điều khiển vị trí, vận tốc, gia tốc
- Encoder x4, tích hợp bộ lọc nhiễu encoder
- Phương thức giao tiếp: UART, USB
- Tích hợp các bộ điều khiển vòng kín: PID, PI, State feedback
- Tích hợp công cụ tự động giò tìm thông số PID cho động cơ
- Tích hợp nhiều chế độ bảo vệ: dòng điện, trễ pha…
Hướng dẫn sử dụng
- Sơ đồ nối dây

- Lệnh điều khiển
| Các thông số | Ý nghĩa |
|---|---|
| Nx | x là địa chỉ của driver (x=0 là địa chỉ Broadcast) |
| Py | y là vị trí muốn điều khiển đến (rad) |
| Vz | z là vận tốc (rad/s) |
| Aj | j là gia tốc (rad/s2) |
| G | Lấy vị hiện tại, driver sẽ truyền UART giá trị của vị trí. |
| S | Dừng |
| r | Reset vị trí |
| Mx | Thay đổi mode hoạt động, x = mode |
| Tx | Thay đổi duty cycle |
- Ví dụ gửi đến driver có đia chỉ là 2, chạy đến vị trí 500 rad, vận tốc 40 rad/s, gia tốc 40 rad/s2 thực hiện lệnh sau: mySerial.println("{N2 P500 V40 A2000 }");
- Link code tham khảo
- Link tải driver.
Tham khảo
Đặc biệt
Thiết kế sx tại Việt Nam:
Sản phẩm cùng loại



IoT Maker Việt Nam
Người đại diện pháp luật: Ông Trịnh Hoàng Đức
Công ty Cổ phần Công Nghệ Gri Tech
Mã số thuế/Số QĐ thành lập: 0313885664
Trụ sở: 152 Đường Số 6, Khu Phố 2, Quận 9, Hồ Chí Minh

Công ty Cổ phần Công Nghệ Gri Tech
Mã số thuế/Số QĐ thành lập: 0313885664
Trụ sở: 152 Đường Số 6, Khu Phố 2, Quận 9, Hồ Chí Minh
Liên hệ
ĐT: 035 6250116
Thời gian làm việc: 8h Sáng - 17h30 hàng ngày (CN Nghỉ)
Email: support@iotmaker.vn
Thông tin chuyển khoản:
STK: 0381000447467
TRÌNH HOÀNG ĐỨC
VIETCOMBANK